Le logiciel de calcul de structure RFEM 6 constitue la base d'une famille de logiciels modulaires. Le logiciel de base RFEM 6 permet de définir la structure, les matériaux et les sollicitations de structures planes et spatiales composées de barres, plaques, voiles et coques. Vous pouvez aussi travailler sur des structures combinées constituées de solides et d'éléments de contact.
Grâce à RSTAB, l'ingénieur structure a accès à un logiciel de structures filaires 3D qui répond aux exigences du calcul de structure moderne et reflète l'état actuel des techniques de construction.
Vous passez souvent trop de temps à calculer des sections ? Les logiciels Dlubal et le programme autonome RSECTION vous facilitent la tâche en déterminant et en effectuant une analyse des contraintes pour différentes sections.
Savez-vous toujours d'où vient le vent ? Du côté de l'innovation, bien sûr ! Avec RWIND 2, vous disposez d'un programme utilisant une soufflerie numérique pour la simulation numérique des flux de vent. Le programme simule ces flux autour de n'importe quelle géométrie de bâtiment et détermine les charges de vent sur les surfaces.
Vous souhaitez obtenir un aperçu des zones de charge de neige, des zones de vent et des zones sismiques ? Si tel est le cas, vous êtes au bon endroit. Utilisez notre outil de géolocalisation pour déterminer rapidement et efficacement les zones de neige, de vent et de sismicité selon l'Eurocode et d'autres normes internationales.
Souhaitez-vous tester la puissance des logiciels Dlubal Software ? C'est votre chance ! Avec la version complète gratuite de 90 jours, vous pouvez tester l'ensemble de nos logiciels.
Les fonctions les plus importantes pour l'utilisation de RFEM sont décrites dans le manuel en ligne de RFEM 6. Un court chapitre théorique est également consacré aux éléments finis. Vous trouverez aussi des informations utiles sur la modélisation et l'évaluation des résultats des calculs aux éléments finis dans les articles techniques de notre base de connaissance.
Bien entendu, la documentation ne peut pas remplacer la littérature spécialisée. Vous trouverez ci-dessous des lectures recommandées pour vous familiariser avec le sujet « Éléments finis » :
Cette liste n'est qu'une petite sélection de recommandations. Vous trouverez également d'autres ouvrages techniques dans les références des travaux mentionnés.
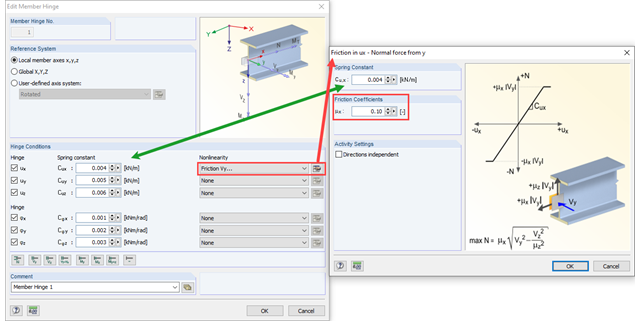
La friction représente une non-linéarité et peut donc être modifiée uniquement via l'interface de l'articulation de barre.
Pour ce faire, vous devez d'abord créer l'articulation de barre, si elle n'est pas déjà disponible. L'interface IMemberHinge est ensuite dirigée vers l'articulation de barre, puis vers la non-linéarité (IFriction, ici). Les méthodes GetData et SetData permettent alors de modifier les données (ici Friction) :
Sub SetMemberHingeFriction() Dim model As RFEM5.model Set model = GetObject(, "RFEM5.Model") model.GetApplication.LockLicense On Error GoTo e Dim data As IModelData Set data = model.GetModelData Dim hinge(0 To 0) As RFEM5.MemberHinge hinge(0).No = 1 hinge(0).RotationalConstantX = 1 hinge(0).RotationalConstantY = 2 hinge(0).RotationalConstantZ = 3 hinge(0).TranslationalConstantX = 4 hinge(0).TranslationalConstantY = 5 hinge(0).TranslationalConstantZ = 6 hinge(0).Comment = "Member Hinge 1" hinge(0).TranslationalNonlinearityX = FrictionAType data.PrepareModification data.SetMemberHinges hinge data.FinishModification ' get interface for member hinge Dim imemhing As IMemberHinge Set imemhing = data.GetMemberHinge(1, AtNo) ' get interface for nonlinearity "friction" Dim iFric As IFriction Set iFric = imemhing.GetNonlinearity(AlongAxisX) ' get friction data Dim fric As Friction fric = iFric.GetData fric.Coefficient1 = 0.3 ' set friction data data.PrepareModification iFric.SetData fric data.FinishModification e: If Err.Number <> 0 Then MsgBox Err.Description, , Err.Source Set data = Nothing model.GetApplication.UnlockLicense Set model = NothingEnd Sub
Dans le cas de la friction Vy + Vz, le Coefficient2 est utilisé pour définir le second coefficient. Le ressort dans la boîte de dialogue de la friction est contrôlé via celui de l'articulation de barre. Dans le cas traité ici, il s'agit de TranslationalConstantX pour la direction x (voir la Figure 01).